Interface VI-CarRealTime SCANeR studio

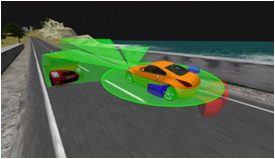
Oktal et VI-grade ont conclu un partenariat pour la réalisation d’une interface entre VI-CarRealTime et SCANeR Studio l’environnement de simulation de circulation et de conception de capteurs (caméras, radar, Lidar, GPS, Ultra son). L’objectif de cet accord est de permettre aux concepteurs d’ADAS d’utiliser un modèle de véhicule précis et robuste qui sera le même que celui utilisé par les dynamiciens, s’intégrant à l’environnement de simulation de circulation proposé par SCANeR Studio.
Par ailleurs, lors des phases de mise au point des capteurs et des systèmes de contrôles, cette interface permettra aux concepteurs de lancer automatiquement des explorations paramétriques pour optimiser les caractéristiques des capteurs, et valider leur comportement sur un grand nombre de cas d’applications.
Une fois les caractéristiques idéales des capteurs identifiées, les interactions entre les ADAS et le conducteur pourront être validées lors de tests sur simulateurs de conduite.
Les ADAS (Advanced Driver Assistance Systems) sont des systèmes développés pour améliorer, modifier, piloter les équipements des véhicules dédiés à la sécurité, et améliorer la conduite.
Les fonctions de sécurité sont conçues pour éviter les collisions, et réduire les risques d’accident grâce à des technologies alertant le conducteur de l’apparition d’un risque potentiel, ou encore éviter les collisions, en implémentant des gardes fous ou la prise de contrôle du véhicule.
Les fonctionnalités permettant l’adaptation du véhicule aux conditions peuvent automatiser l’activation de l’éclairage, modifier la vitesse de croisière, activer le freinage, tenir compte des alertes relatives aux modifications des conditions de circulation transmises par le GPS, se connecter au téléphone, prévenir le conducteur de la présence d’autres véhicules ou de risques, maintenir le véhicule dans sa voie de circulation, et permettre de visualiser les angles morts.
Le secteur des ADAS représente une des disciplines les plus dynamiques de l’électronique automobile : Dans toutes les applications mentionnées ci-dessous, le véhicule, les systèmes de commande et l’environnement extérieur interagissent entre eux, et par conséquent, il est indispensable que chacun de ces éléments soit représenté avec précision:
- Adaptation automatique de la vitesse
- Changement de voie
- Communication entre véhicules
- Détection des angles morts
- Evitement des collisions
- Evitement des piétons
- Exécution de manœuvres d’urgence
VI grade a mis en place des interfaces, des partenariats, et des outils pour rendre possible le développement des systèmes ADAS en utilisant exactement la même précision que celle obtenue avec le modèle de véhicule temps réel utilisé pour les simulations de comportement dynamique, et de comportement sur piste.
VI-grade a réalisé une plateforme d’échange au travers de laquelle, sa technologie (construite à partir de sa solution VI-CarRealTime), les solutions de référence pour la conception des systèmes de commande (MATLAB Simulink, MapleSim, etc), et les logiciels de simulation de circulation routière échangent les uns avec les autres.
Pour y parvenir, VI-grade a conclu des accords de collaboration avec tous les acteurs proposant des environnement de simulation de circulation routière et des capteurs. Ainsi VI-grade fournit un modèle de véhicule d’une grande fiabilité, et nos partenaires fournissent les fonctions ADAS et de modélisation de l’environnement.
Grâce à cette offre intégrée, trois environnements dédiés aux simulations des systèmes ADAS sont disponibles:
- Software-in-the-loop (SIL), C’est la première activité réalisée lors du développement d’un nouveau système de commande: L’environnement est utilisé pour développer et valider les nouvelles lois de commande sont avec des modèles véhicules temps réels,
- Hardware-in-the-loop (HIL), à ce stade l’environnement est utilisé pour valider les lois de commandes actives avec toutes les conditions opérationnelle. La fiabilité de la loi de commande, l’existence de scénarios défaillants, et les considération de sécurité deviennent primordiaux.
- Driver-in-the-loop (DIL) , la nouvelle approche pour le développement des véhicules et des systèmes de commandes actifs : Avec les simulateurs de conduite, il devient possible d’anticiper et de tester plus de scénarios en amont du cycle de développement lorsque les prototypes ne sont pas encore disponibles. Les activités SIL et HIL se rejoignent lorsqu’un simulateur de conduite est utilisé dans le processus de développement d’un véhicule.
Grâce au partenariat entre Oktal et VI-grade les utilisateurs de SCANeR Studio pourront utiliser les modèles de véhicules construits avec VI-CarRealTime. Cette possibilité garantira la cohérence du modèle de véhicule sur l’ensemble de la chaîne de conception sur laquelle interviennent les ingénieurs dynamiciens, les concepteurs de lois de commandes, les concepteurs de capteurs et les pilotes, en leur permettant d’utiliser un modèle de véhicule unique, répondant aux critères de précisions indispensable à la conception des solutions d’assistance avancée à la conduite.









{kind=link}
Laisser un commentaire
Rejoindre la discussion?N’hésitez pas à contribuer !